

TACO BIM
TACO BIM facilitates the planning and execution of robotic fabrication processes directly from within the parametric design environment. It is a computational framework for research in architecture and digital fabrication. [....]
In-situ Robotic Fabrication
This research takes an important step in characterizing a novel field of construction robotics where a robotic system moves on a construction site and positions fabricating componment in-situ. In addition, it is a unique apporach [....]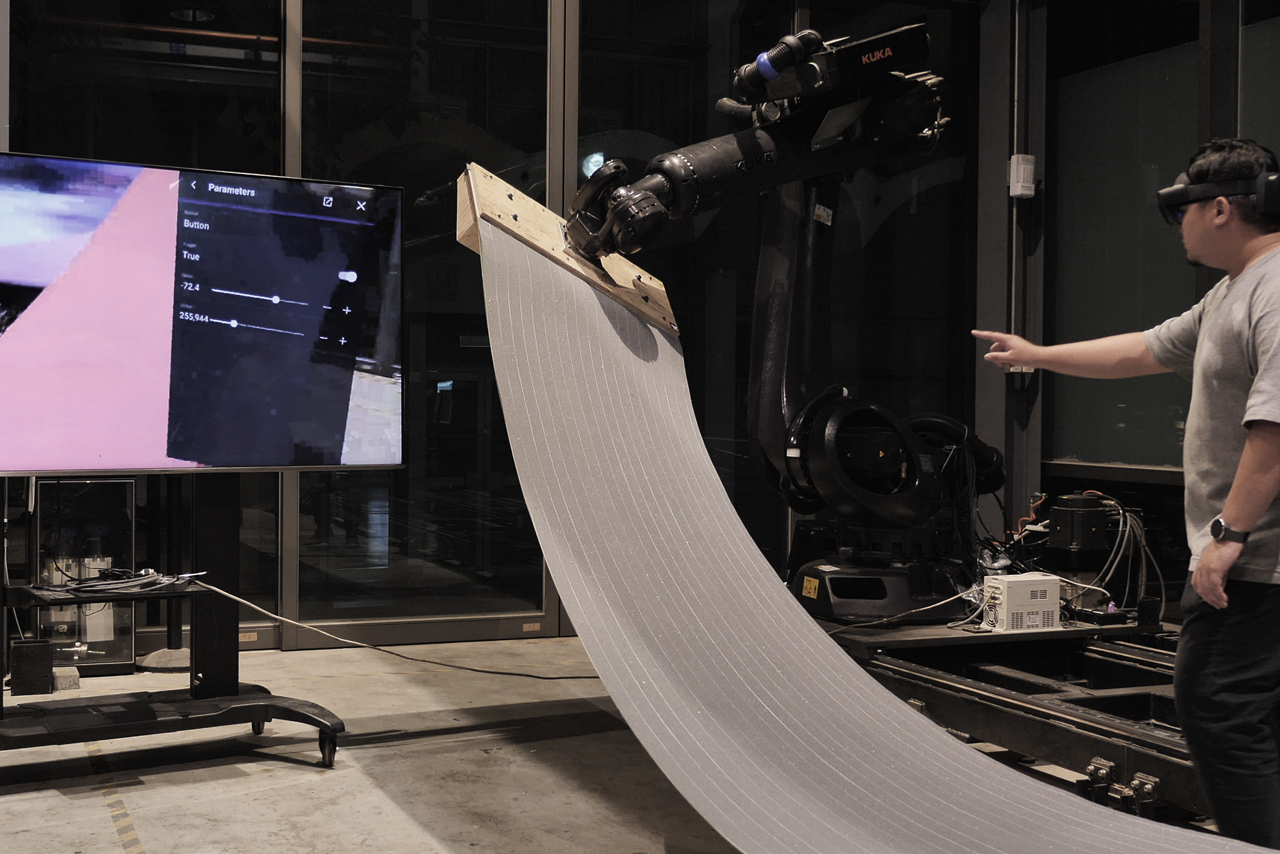
Human-Robot Collaboration
This reseach aims to explore and implement human-robot collaborative strategies in architecture. As such, it focuses on a novel method and tools needed for human and robots to perfom non-standard fabrication tasks. [....]
Robotic 3D Printed Formwork
This research explores the unique potential of 3D printing formwork and casting concrete for architecture. Using this method, geometrically complex structures can be fabricated efficiently, minimizing formwork waste. [....]
Glass Robotics
Glass robotics proposes a glass 3D printing system that can be used at room temperature. The system employs high-frequency electromagnetic induction heaters and stone-ground carbon tubes to heat glass raw materials. In this [....]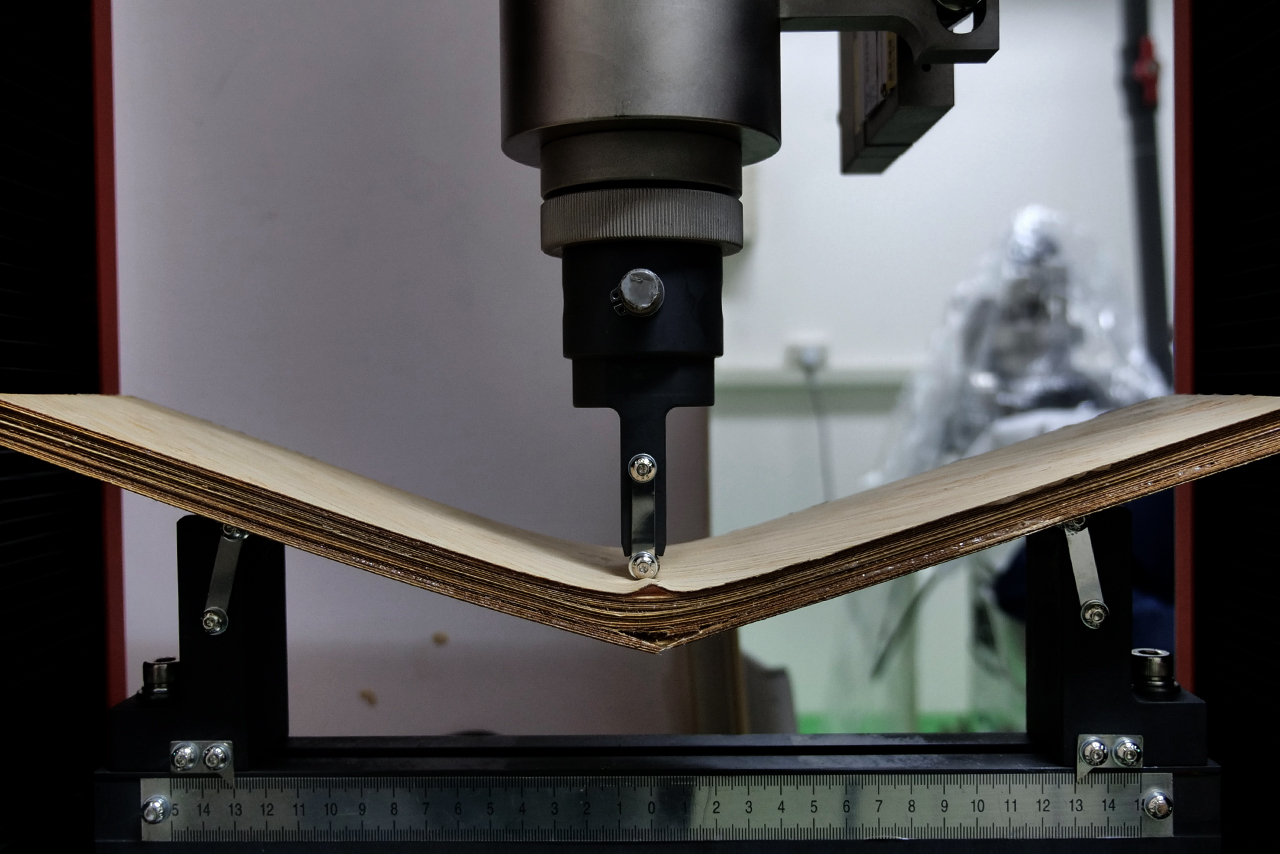
Glued Laminated Bamboo (GLB)
This research aims to introduce the development of a new- style glue-laminated bamboo (GLB) board structure and evaluating computational technologies [....]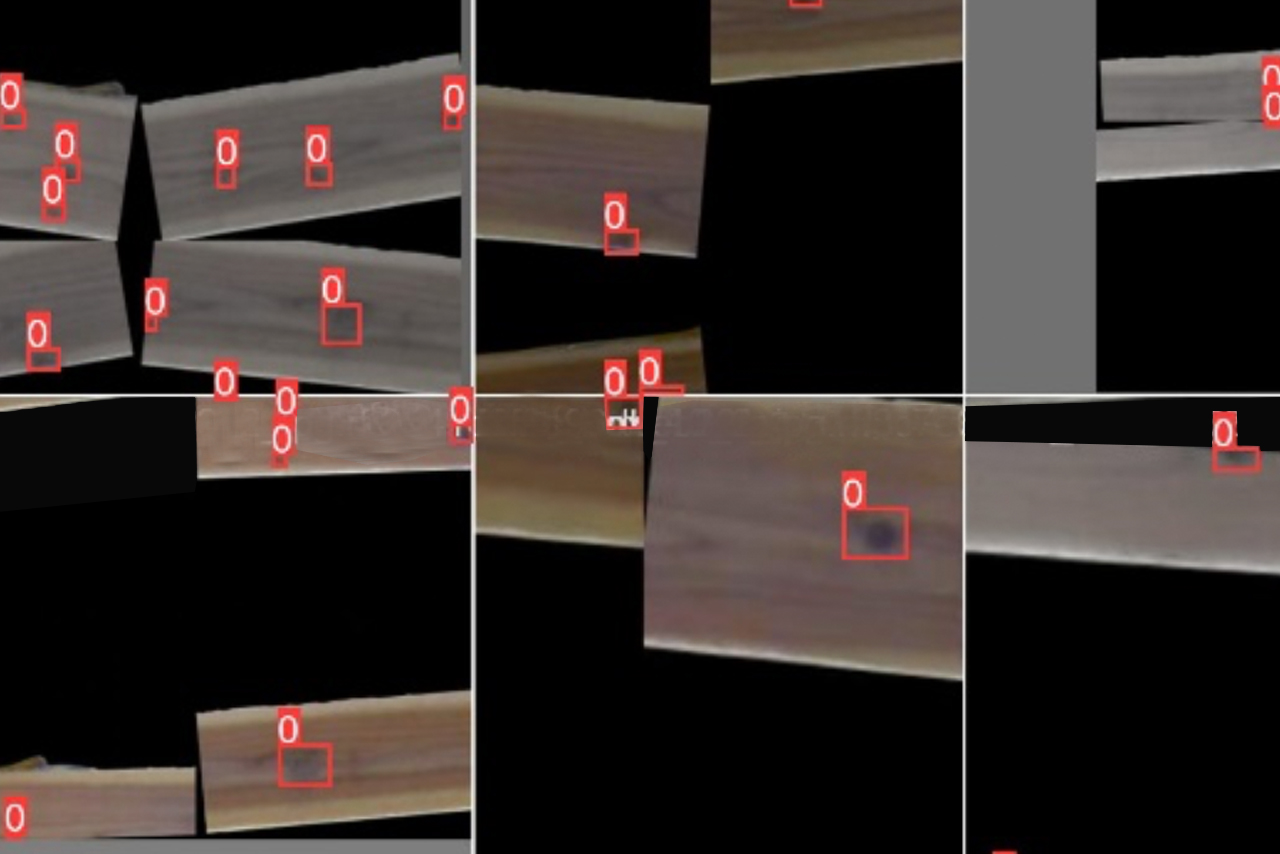
Timber Architecture
In timber research, we investigate, establish, and clarify significant knowledge connections within the domains of computational wood architecture and robotic timber construction. [....]
Latent Space
Latent Space delves into cutting-edge tools that harness machine learning and data to enhance architectural design. In architecture, the concept of latent space signifies a significant shift from [....]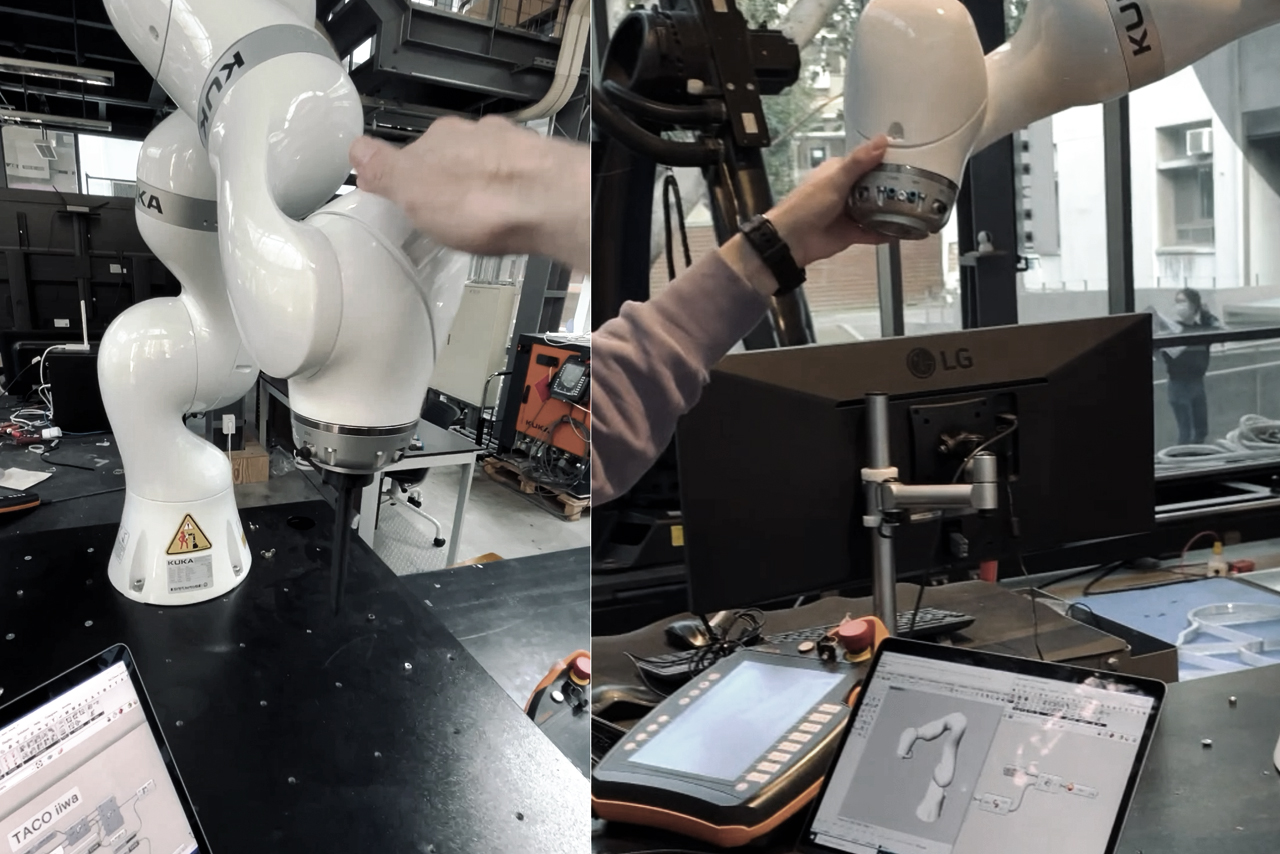
Impedance Control of Human–Robot Collaboration
This reseach aims to explore and implement human-robot collaborative strategies in architecture. As such, it focuses on a novel method and tools needed [....]

Tactile Robotics
Spatial glass bonds introduces an adaptive robotic spatial aggregation system for the development of an intricate self-supporting glass structure. Rather than using discrete and standardized building elements in the design and fabrication process, [....]
Metal Curving
This research introduces the notion of transient materialization to investigate a novel approach of robotic fabrication. Transient materialization explores a new logic of materialization that takes the advantage of differentiated [....]
Liquid Stone
Liquid Stone challenges the current method of developing a formwork that is used as a mold in concrete building construction. Unlike the standardized formwork system, which either builds the molds on-site or fabricates them in a factory [....]ABOUT
ROSO是一個前衛且跨學科的研究團隊。實驗室的主要目標為利用創新的機器人技術與運算設計思維,提供智能建造的流程,並利用當今各式各樣的新興科技相互碰撞下,開啟更多〈建築的想像力〉與〈建造的可能性〉之討論。
ROSO is an interdisciplinary research team. The main objective of the laboratory is to use innovative robotics technology and computational design thinking to provide diverse intelligent construction processes and solutions. Through the collision of various emerging technologies, ROSO aims to open up discussions on "the imagination of architecture" and "the possibilities of construction.
ROSO是一個前衛且跨學科的研究團隊。實驗室的主要目標為利用創新的機器人技術與運算設計思維,提供智能建造的流程,並利用當今各式各樣的新興科技相互碰撞下,開啟更多〈建築的想像力〉與〈建造的可能性〉之討論。
ROSO is an interdisciplinary research team. The main objective of the laboratory is to use innovative robotics technology and computational design thinking to provide diverse intelligent construction processes and solutions. Through the collision of various emerging technologies, ROSO aims to open up discussions on "the imagination of architecture" and "the possibilities of construction.